Introduction
ELF/VLF radio signals, in approximately the 300Hz to 30kHz band, are commonly used for ionospheric remote sensing, geophysical prospecting, and studies of the near-Earth space environment. Naturally occurring ELF/VLF emissions from lightning strikes can be detected for thousands of miles and provide an abundance of wave-particle interaction possibilities in the radiation belts.
Introduction
ELF/VLF radio signals, in approximately the 300Hz to 30kHz band, are commonly used for ionospheric remote sensing, geophysical prospecting, and studies of the near-Earth space environment. Naturally occurring ELF/VLF emissions from lightning strikes can be detected for thousands of miles and provide an abundance of wave-particle interaction possibilities in the radiation belts. Any applied studies of these events, however, require electromagnetic waves in the ELF/VLF band to be amplified, captured, processed, and stored. Many of these studies also require that receivers be deployed in extremely remote, electromagnetically quiet locations such as Antarctica, Alaska, or even the middle of the ocean. These needs necessitate the development of low-power ELF/VLF receivers that are capable of autonomous operation in harsh environments without external power sources.
Receiver Architecture
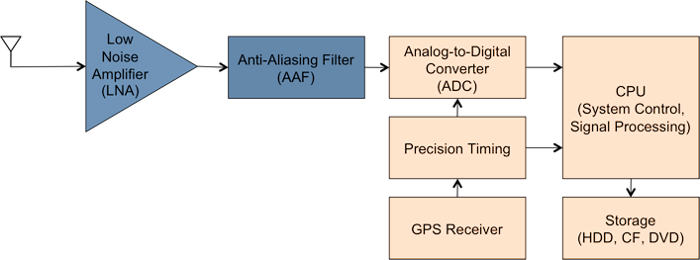
A typical ELF/VLF receiver records broadband data over the entire 300Hz-30kHz ELF/VLF band. A direct conversion, or zero IF, radio receiver is almost always used since modern analog-to-digital (ADC) converters are more than capable of sampling sufficiently fast to capture the entire ELF/VLF band without downconversion. This allows us to avoid using heterodyning techniques, which reduces complexity and saves power. A block diagram of a typical ELF/VLF receiver is shown in Figure 1. As can be seen, the signal from the antenna is amplified in a
low-noise amplifier, anti-alias filtered, and then directly sampled by the ADCs. A CPU then performs any necessary signal processing on the data then writes it to nonvolatile storage (usually flash memory).
Since the amount of data a receiver is capable of recording is constrained by the battery size or storage space, most autonomous ELF/VLF receivers do not sample data continuously. Rather, they operate on a “synoptic” sampling schedule. That is, they sample data for a short period of time and then sleep until the next sampling period, thus saving valuable battery charge. As an example, the Penguin system that operates autonomously in Antarctica for a year only records 8 seconds per hour.
One of the most critical parts of the receiver design is the timekeeping circuitry and logic. It is absolutely essential for most applications that data be correlated to the correct time with extremely high precision. This allows data from multiple receivers to be accurately compared and interferometric studies to be performed. However, autonomous receivers typically keep track of elapsed time using a simple counter circuit and crystal oscillator, which drift over time. This oscillator drift is also severely exacerbated by the cold temperatures at the South Pole. To address this problem, we typically use a GPS receiver to discipline our local clock periodically, giving us extremely good time resolution.
Autonomous, Ultra-low Power Systems
One autonomous ELF/VLF receiver that our group has built is the Penguin system (Figure 2). Recently, Penguin was successfully deployed at the South Pole (Figure 3) for an entire year where it captured 8 sec/hr synoptic broadband data and had to withstand temperatures as low as -60 C. It operated on a battery pack of low temperature lithium-thionyl-chloride primary cells and was buried several feet under the ice so as to provide some insulation against the cold air. Penguin’s power consumption is an average of 18mW. Another system currently in development, known as VLF Advanced Technology (VAT), is capable of capturing continuous ELF/VLF broadband data with a power consumption of just 168mW (Figure 2).
|

|
More information on autonomous, ultra-low power ELF/VLF receiver systems can be found in Max Klein’s
thesis.
Future work in this area involves the inclusion of on-board signal processing, such as automated event detection, to increase the amount of scientifically useful data stored by the systems.
|
Acknowledgement
This work is supported by a grant from the National Science Foundation Office of Polar Programs as part of the PENGUIn collaboration.